Abstract
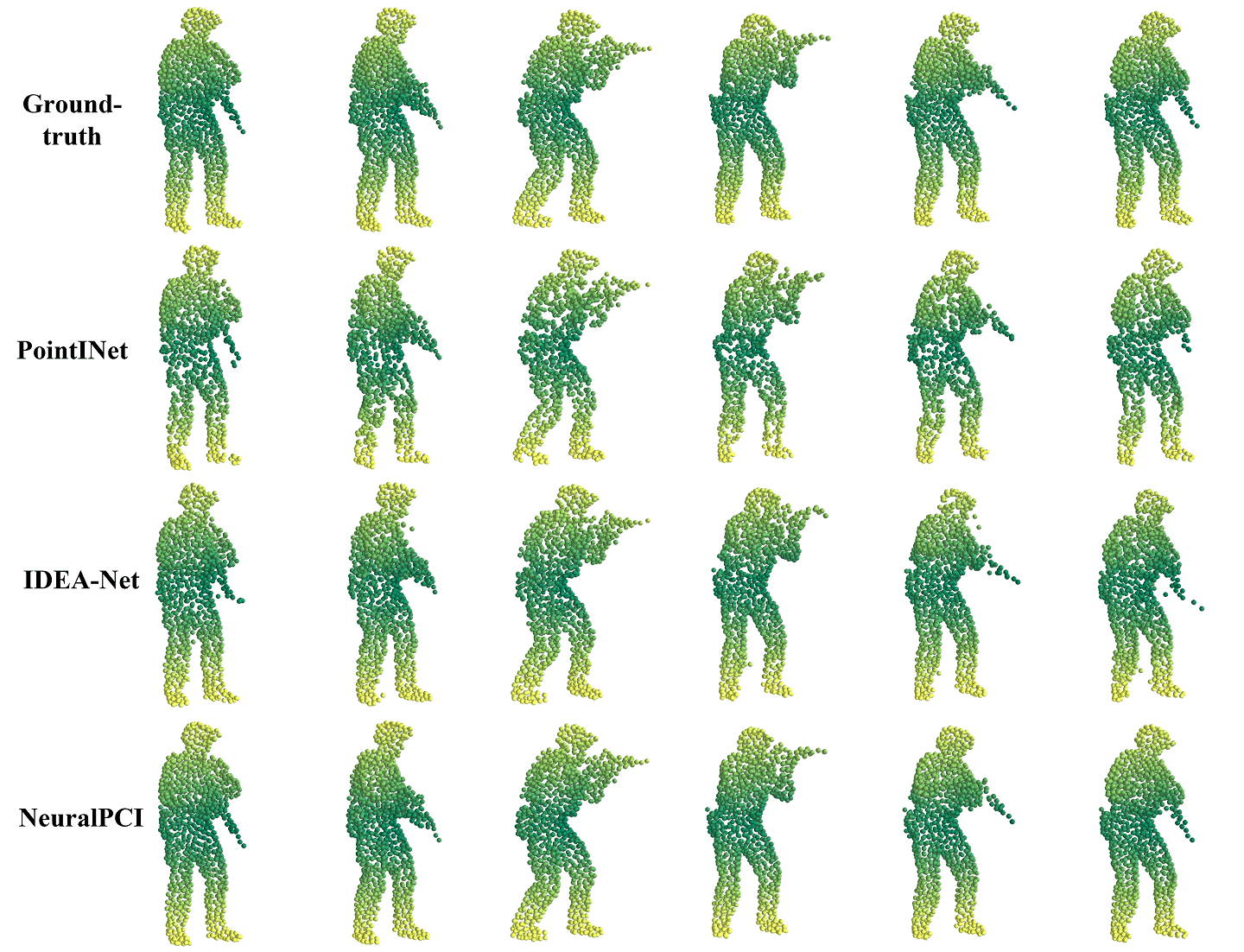
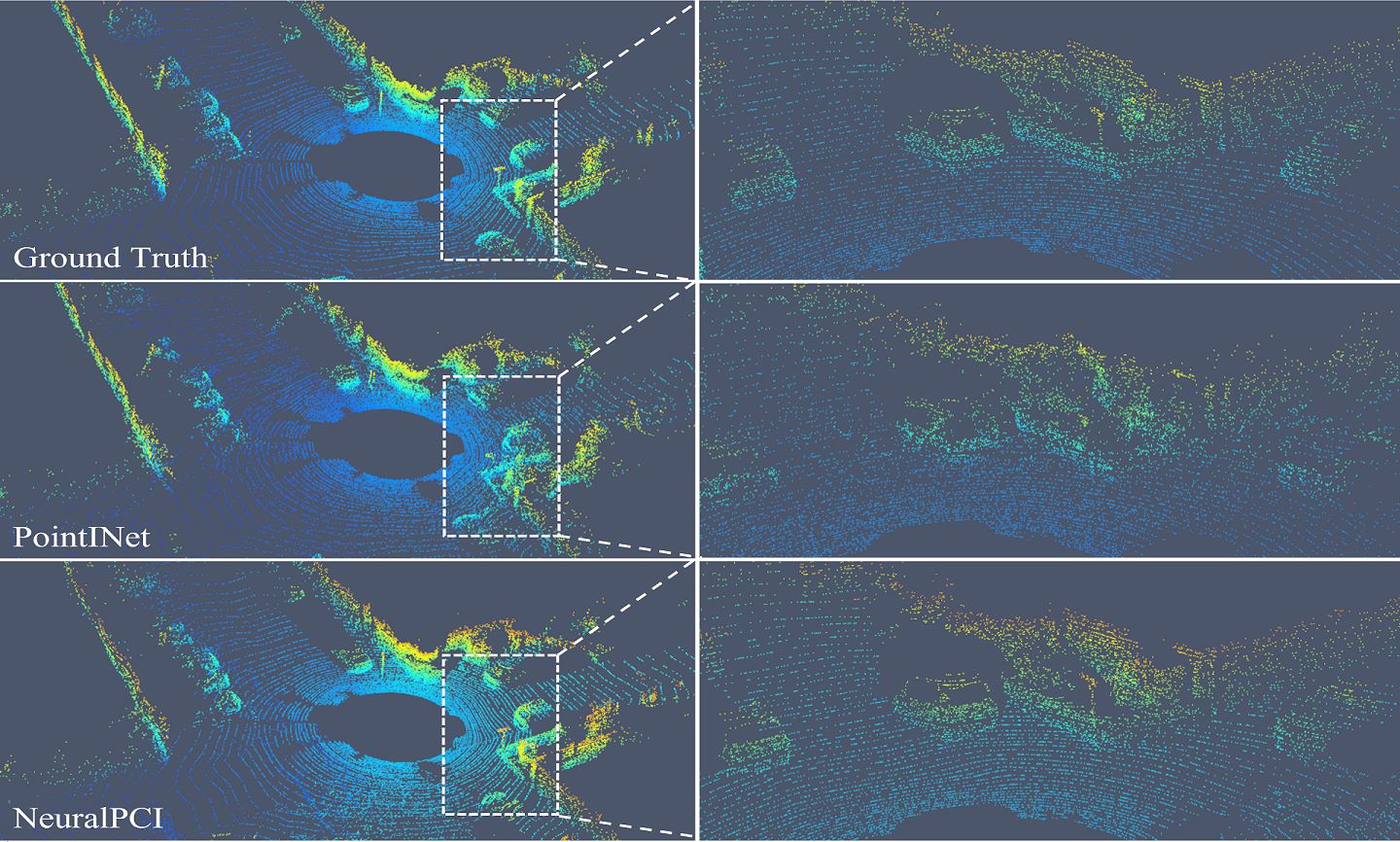
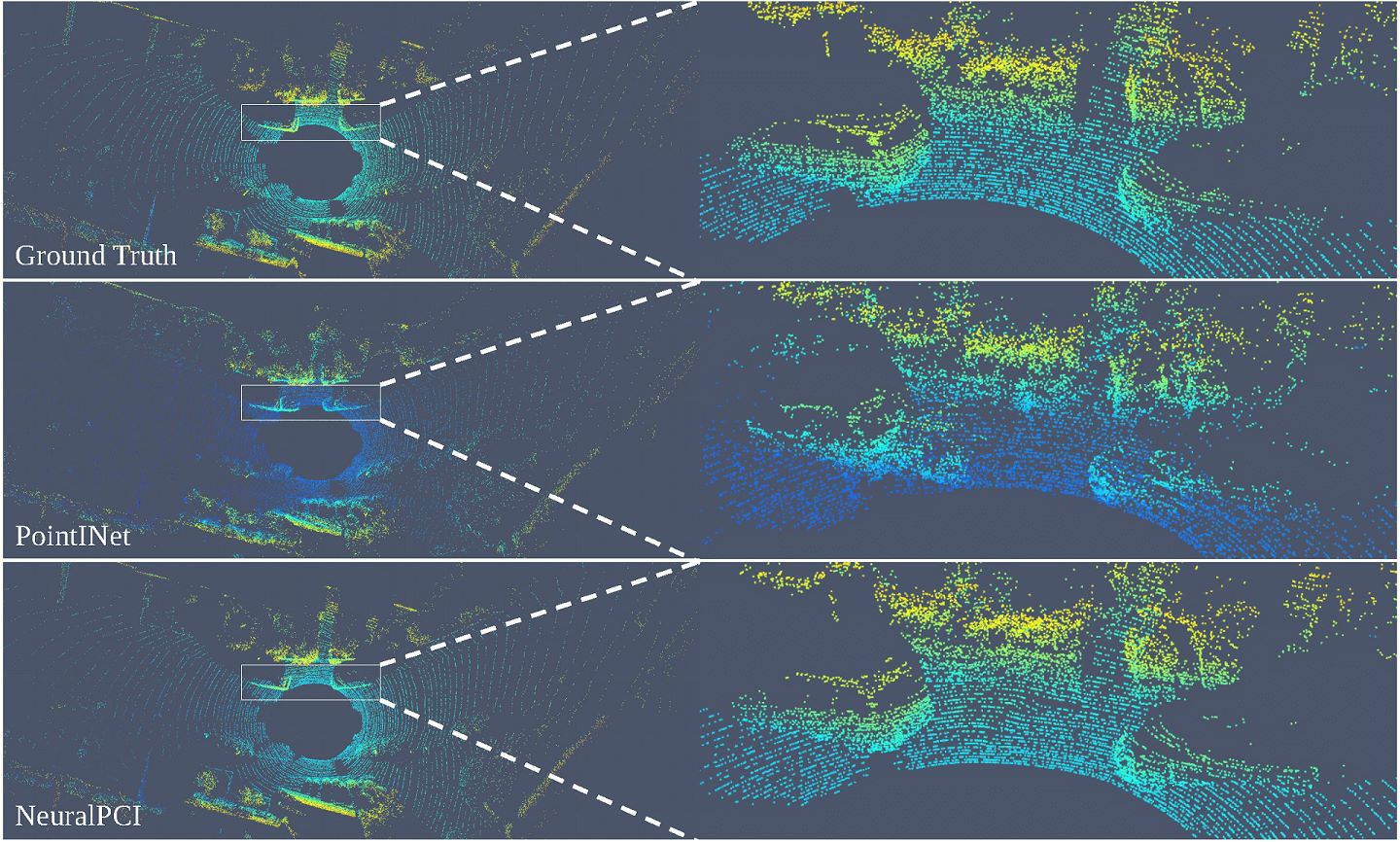
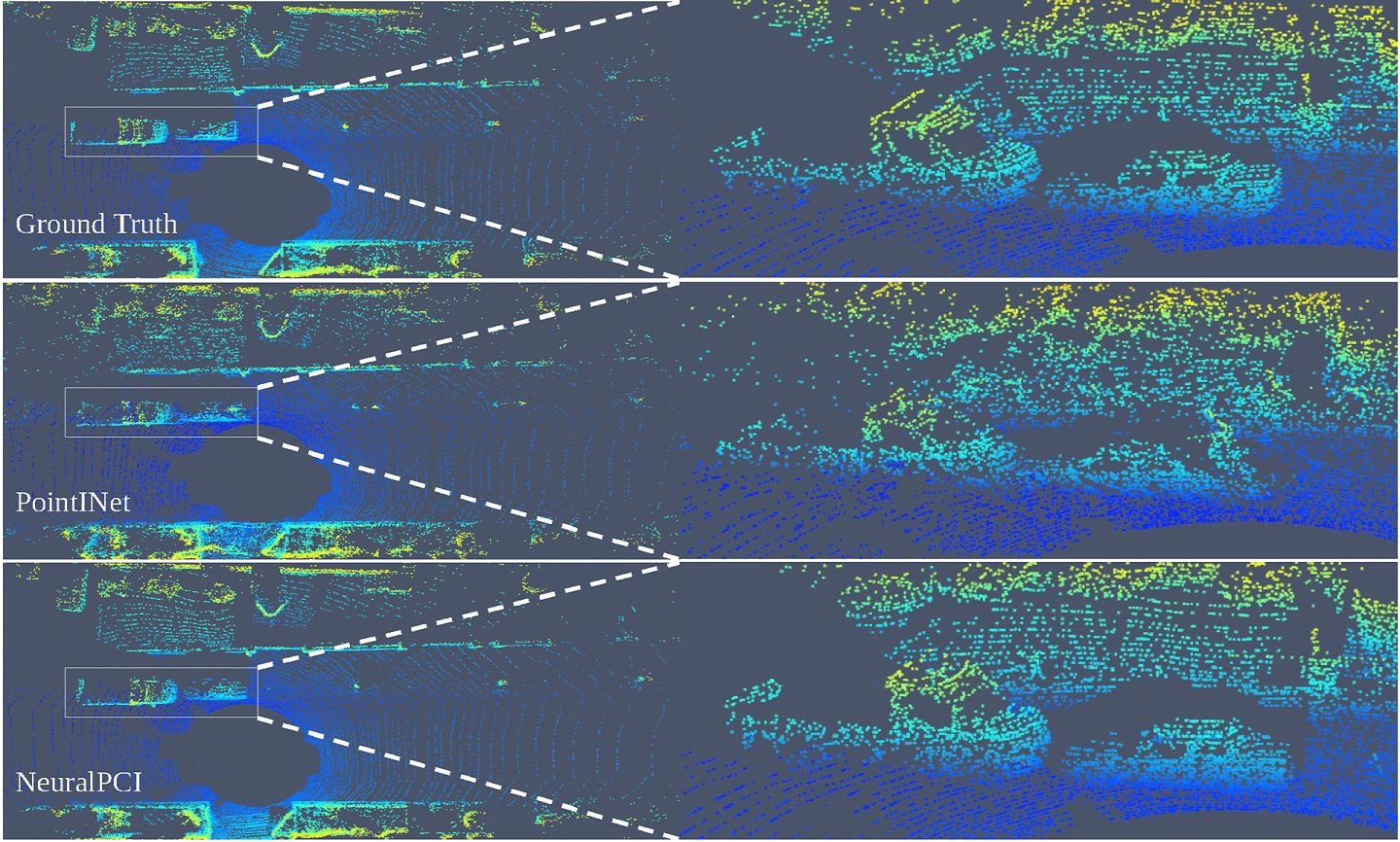
In recent years, there has been a significant increase in focus on the interpolation task of computer vision. Despite the tremendous advancement of video interpolation, point cloud interpolation remains insufficiently explored. Meanwhile, the existence of numerous nonlinear large motions in real-world scenarios makes the point cloud interpolation task more challenging. In light of these issues, we present NeuralPCI: an end-to-end 4D spatio-temporal Neural field for 3D Point Cloud Interpolation, which implicitly integrates multi-frame information to handle nonlinear large motions for both indoor and outdoor scenarios. Furthermore, we construct a new multi-frame point cloud interpolation dataset called NL-Drive for large nonlinear motions in autonomous driving scenes to better demonstrate the superiority of our method. Ultimately, NeuralPCI achieves state-of-the-art performance on both DHB (Dynamic Human Bodies) and NL-Drive datasets. Beyond the interpolation task, our method can be naturally extended to point cloud extrapolation, morphing, and auto-labeling, which indicates substantial potential in other domains.