
Zehan Zheng | 郑泽涵
💫About Me
I am currently a first-year CS Ph.D. student at CCVL Lab of Johns Hopkins University advised by Bloomberg Distinguished Professor Alan L. Yuille. Before this, I obtained my master’s and bachelor’s degree at Tongji University.
My research interests mainly focus on 3D Computer Vision, including Reconstruction/Generation, World Models, VLMs and Embodied AI. During my master’s program, I conducted research at Generalist Embodied AI Lab of Tongji University and advised by Prof. Guang Chen. In 2022, I was a research intern at OpenDriveLab of Shanghai AI Laboratory advised by Prof. Hongyang Li. In 2024, I have been a visiting student at SU Lab of UC San Diego advised by Prof. Hao Su, where I spent a wonderful time in La Jolla.
I’m open to any collaboration opportunity, please feel free to drop me an email📬!
🔥News
[2024/12] Invited Talk at Princeton University. [slides]
[2024/12] Invited as a Reviewer for ICML.
[2024/09] 🎉 Two papers was accepted by NeurIPS 2024.
[2024/08] Invited as a Reviewer for ICLR.
[2024/05] Invited as a Reviewer for NeurIPS.
[2024/02] 🎉 One paper was accepted by CVPR 2024.
[2024/01] Invited as a Reviewer for ECCV.
[2023/11] Invited as a Reviewer for CVPR.
[2023/05] Invited as a Reviewer for ICCV.
[2023/02] 🎉 One paper was accepted by CVPR 2023.
[2022/07] 🎉 One paper was accepted by ECCV 2022 (Oral, top 2.7%).
📝Publications
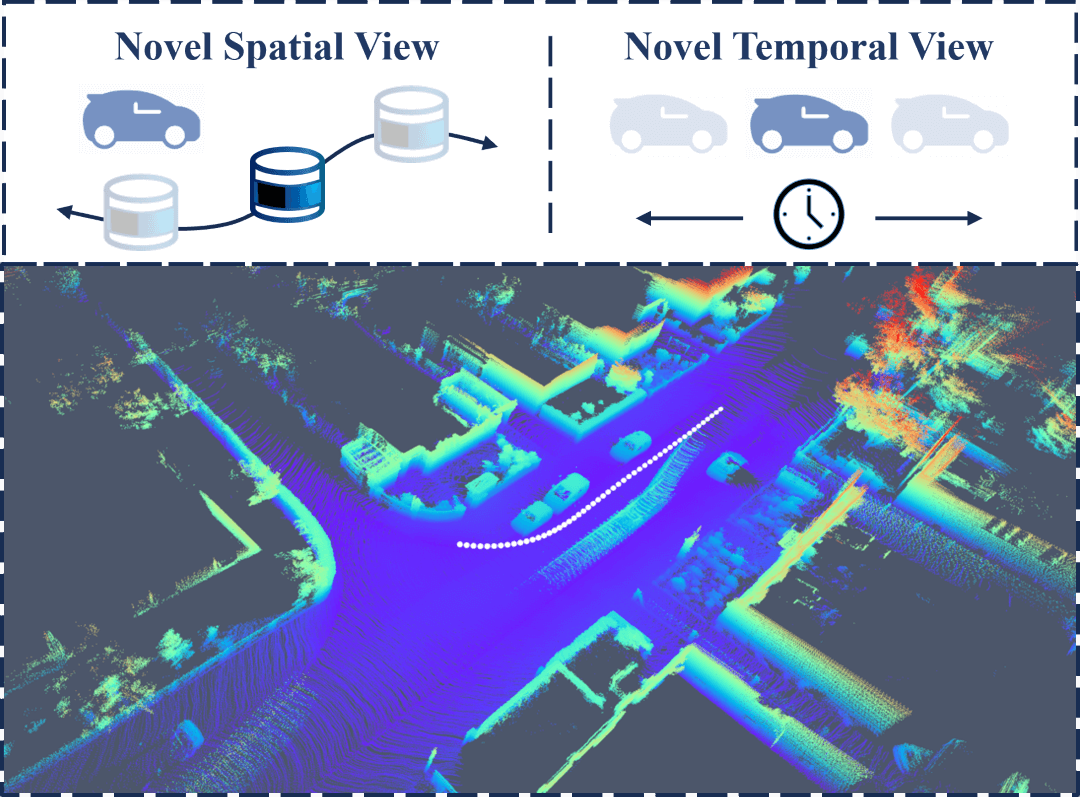
LiDAR4D: Dynamic Neural Fields for Novel Space-time View LiDAR Synthesis
Zehan Zheng, Fan Lu, Weiyi Xue, Guang Chen, Changjun Jiang.
CVPR, 2024
[Paper] | [Code] | [Project Page] | [Video] | [Talk] | [Slides] | [Poster]
Differentiable LiDAR-only framework for novel space-time LiDAR view synthesis, which reconstructs dynamic driving scenarios and generates realistic LiDAR point clouds end-to-end. It also supports simulation in the dynamic scene.
NeuralPCI: Spatio-temporal Neural Field for 3D Point Cloud Multi-frame Non-linear Interpolation
Zehan Zheng∗, Danni Wu∗, Ruisi Lu, Fan Lu, Guang Chen, Changjun Jiang
CVPR, 2023
[Paper] | [Code] | [Project Page] | [Video] (6min)| [Talk] (15min) | [Slides] | [Poster]
4D spatio-temporal Neural field for 3D Point Cloud Interpolation, which implicitly integrates multi-frame information to handle nonlinear large motions for both indoor and outdoor scenarios.
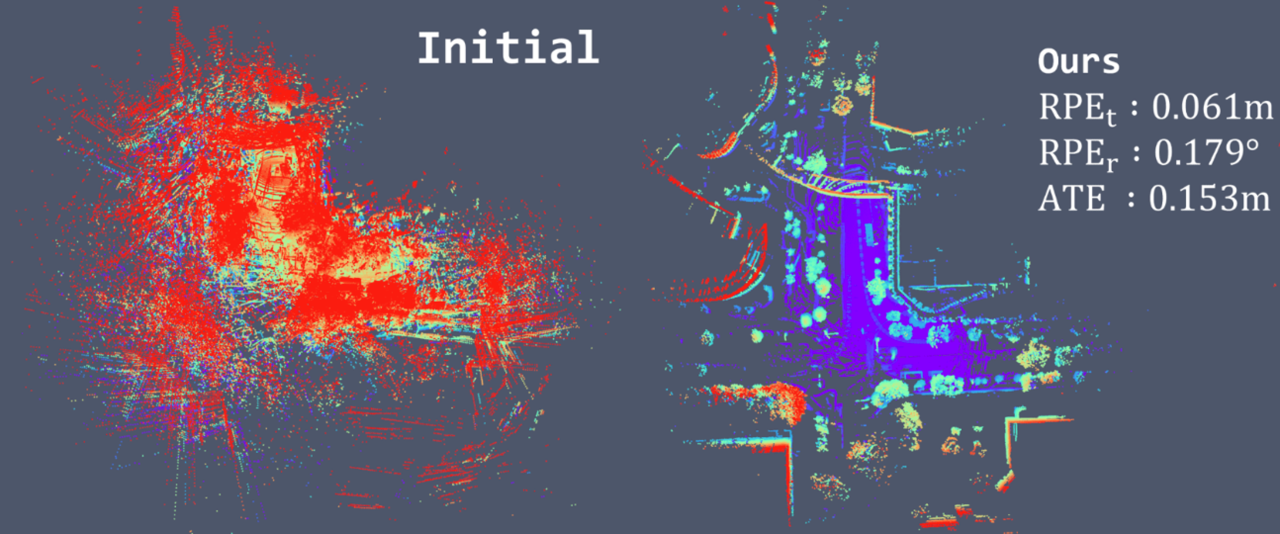
GeoNLF: Geometry-guided Pose-Free Neural LiDAR Fields
Weiyi Xue∗, Zehan Zheng∗, Fan Lu, Haiyun Wei, Guang Chen, Changjun Jiang
NeurIPS, 2024
[Paper] | [Code] | [Poster]
Global neural optimization framework for pose-free LiDAR reconstruction, which provides explicit geometric priors and achieve simultaneous large-scale multi-view registration and novel view synthesis.
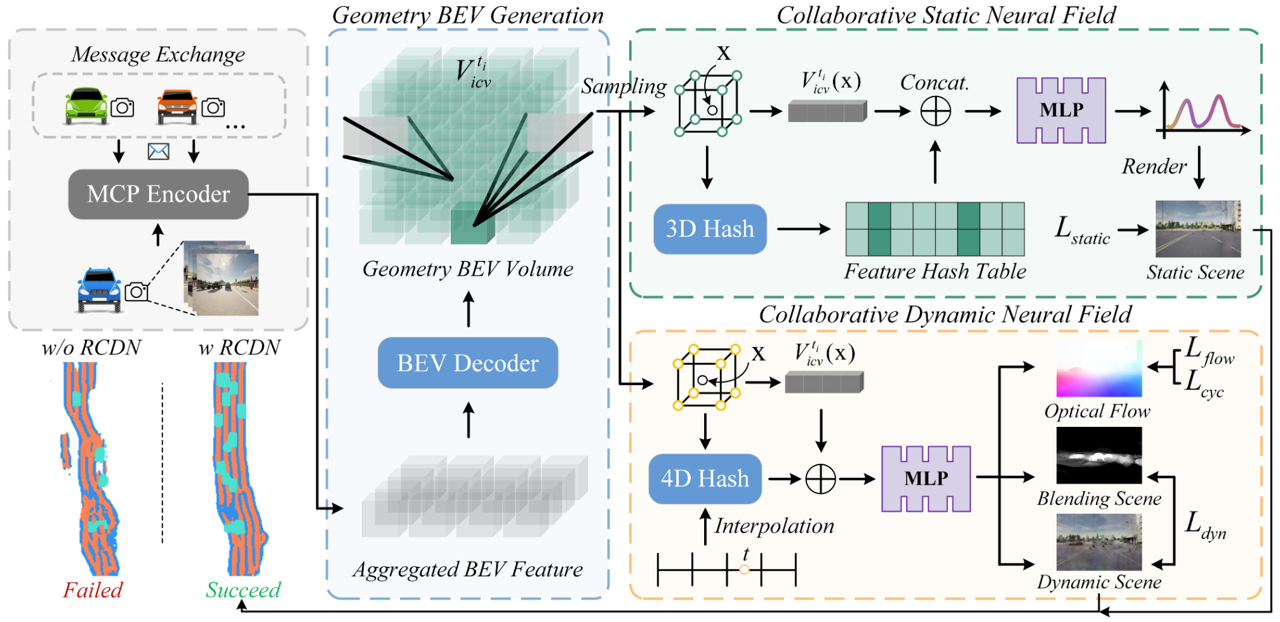
RCDN: Towards Robust Camera Insensitivity Collaborative Perception via Dynamic Feature-based 3D Neural Modeling
Tianhang Wang, Fan Lu, Zehan Zheng, Guang Chen, Changjun Jiang
NeurIPS, 2024
[Paper] | [Slides] | [Poster]
Collaborative perception framework with BEV feature based static and dynamic fields, which can recover failed perceptual messages sent by multiple agents and achieve high collaborative performance with low calibration cost.
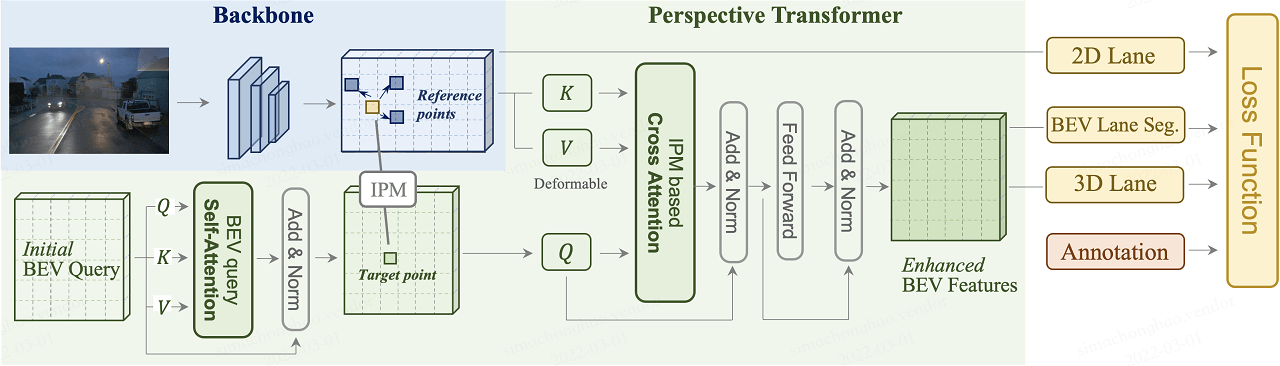
PersFormer: 3D Lane Detection via Perspective Transformer and the OpenLane Benchmark
Li Chen∗, Chonghao Sima∗, Yang Li∗, Zehan Zheng, Jiajie Xu, Xiangwei Geng, Hongyang Li, Conghui He, Jianping Shi, Yu Qiao, Junchi Yan.
ECCV, 2022 (Oral)
[Paper] | [Code] | [Blog] | [Slides] | [Video] (4min) | [Talk] (50min) | [Poster]
End-to-end monocular 3D lane detector with a novel Transformer-based spatial feature transformation module which generates BEV features by attending to related front-view local regions with camera parameters as a reference.
🏗️Projects
Vehicle-mounted Surround-view Fisheye Camera Panoramic Bird’s Eye View (BEV) Calibration
[GitHub Demo]
A novel calibration method for vehicle-mounted surround fish-eye cameras based on the drone, and a real-time bird’s eye view (BEV) generator.

![[Poster]](https://neurips.cc/media/PosterPDFs/NeurIPS%202024/93231.png?t=1733402073.7734404){kind=link}
![[Poster]](https://neurips.cc/media/PosterPDFs/NeurIPS%202024/93052.png?t=1731389969.1951804){kind=link}